\title {Joint Action \\ Lecture 99}
\maketitle
\def \ititle {Lecture 99}
\def \isubtitle {Joint Action}
\begin{center}
{\Large
\textbf{\ititle}: \isubtitle
}
\iemail %
\end{center}

Sharing a Smile
\section{Sharing a Smile}
\section{Sharing a Smile}


[THIRD POINT: smiling is a goal-directed action, the goal of which is to smile that smile]
My topic is sharing a smile. But first think about ordinary, individual actions like genuine smiles.
What distinguishes a genuine smile from a muscle spasm or the exhalation of wind?
I want to suggest that it's this: the smile is a goal-directed action where the goal is to simile that smile.
But why think of the smile as goal-directed? Because smiling the smile requires considerable motor coordination: it’s not a matter of simple muscle contractions but more like the production of a phonetic gesture where context affects what is needed to realise the smile.

Further, like grasping an object or articulating a particular phoneme, it is an action that can be realised by different bodily movements in different contexts.
This is why I put slides of two quite different but both genuine smiles.
[Objection:]
Now you might say that the smile can't be goal-directed because is isn't explicable by appeal to belief, desire and intention
This is because the genuine smile is spontaneous and not something that can be produced at will (although it could probably be inhibited, at least to some extent); after all, this is what distinguishes the genuine from the polite smile.
\footnote{
From web source: The Duchenne smile involves both voluntary and involuntary contraction from two muscles: the zygomatic major (raising the corners of the mouth) and the orbicularis oculi (raising the cheeks and producing crow's feet around the eyes). The zygomatic major can be voluntarily contracted but many people can't voluntarily contract the orbicularis oculi muscle.
}
So now we might be tempted by the view that a smile is merely caused by an emotion in the way that gasses can cause you to burp.
[Reply:]
Maybe there are smiles like this, but some genuine smiles are sustained.
And what sustains them is a process of controll
How could this be if such smiles are not consequences of beliefs, desires and intentions?
I think a reasonably natural view here is to think that part of what makes an event a smile, a goal-directed action and not just a muscle spasm caused by excess wind, is the way that motor control is involved. Specifically, the genuine smile will involve a motor representation of the outcome, the smile, and this motor representation will lead to movements by way of planning-like motor processes.
But you don't have to buy this to agree with me.
All you have to accept is that actions like some smilings can be goal-directed and controlled even in the absence of relevant beliefs, desires and intentions.
I think smiles fall into the category of actions like graspings, reachings and gesturings which are goal-directed but do not necessarily involve intention.
So far, then, I've suggested that smiling is a goal-directed action, the goal of which is to smile that smile.
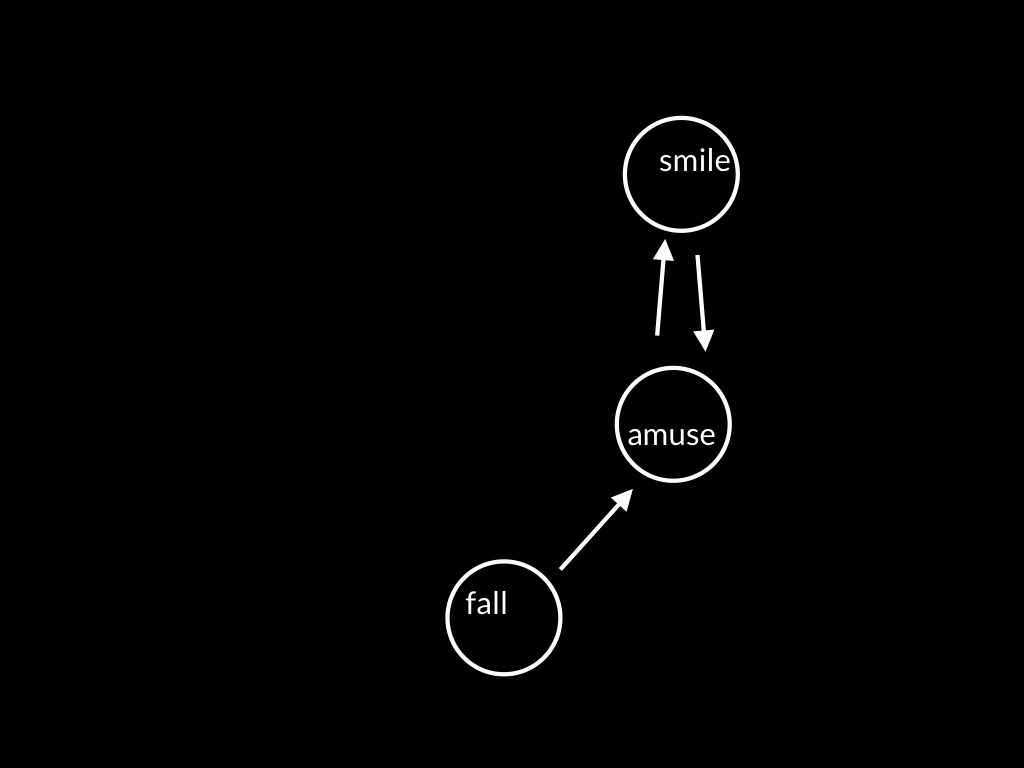
Now imagine a situation where a single individual encounters and event (a clown’s falling) which causes amusement which causes her to smile
Note that the smile also modulates the emotion; if, for example, she supressed the smile, the quality of her amusement would change.
How could we gain insight into the fine-grained dynamics of others’ emotions?
How could we ever appreciate the unfolding of another’s grief, or the way their engagement leads to an explosion of ecstasy at the climax of a concert?
Part of the answer is obvious: by being there, with them.
[Not that this is the only possibility --- in some cases we might be told.]
But how exactly does being there, in the same situation help?
Merely being in the same situation is surely not enough.
It’s not enough that we each experience amusement, grief or ecstasy.
After all, individuals are different. Different individuals’ feelings don’t unfold in the same way just because they are in the same situation.
It’s just here that collective intentionality is relevant.
\textbf{What is involved in sharing a smile?}
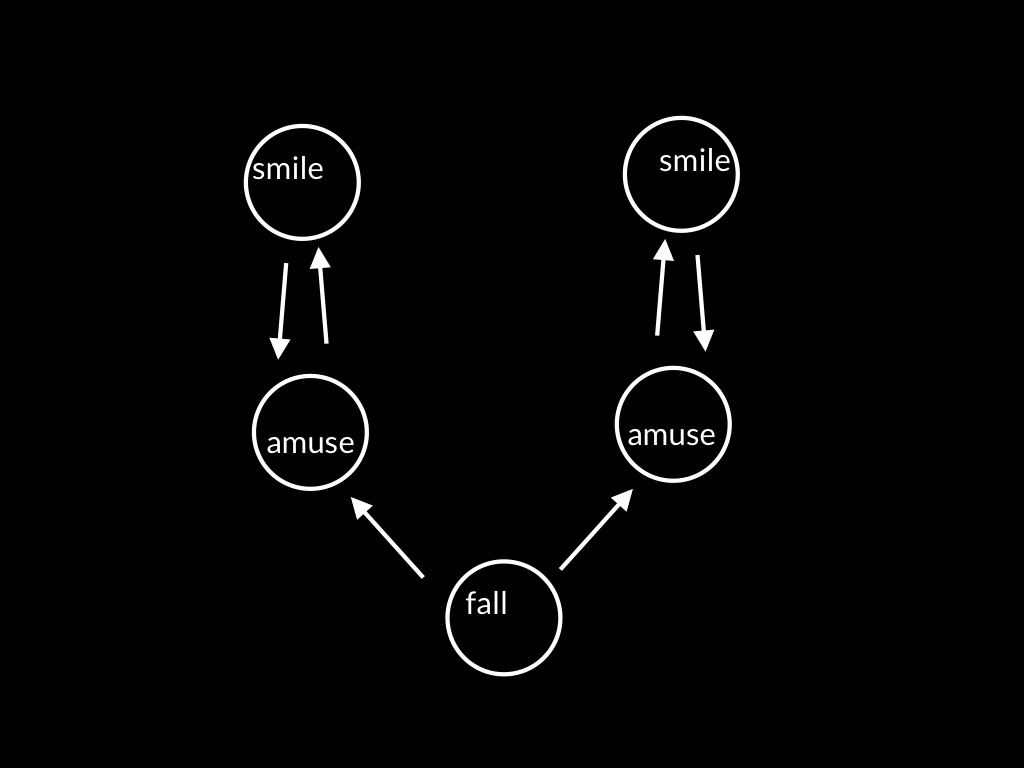
Minimally, I think there have to be two kinds of connection between us for us to share a smile.
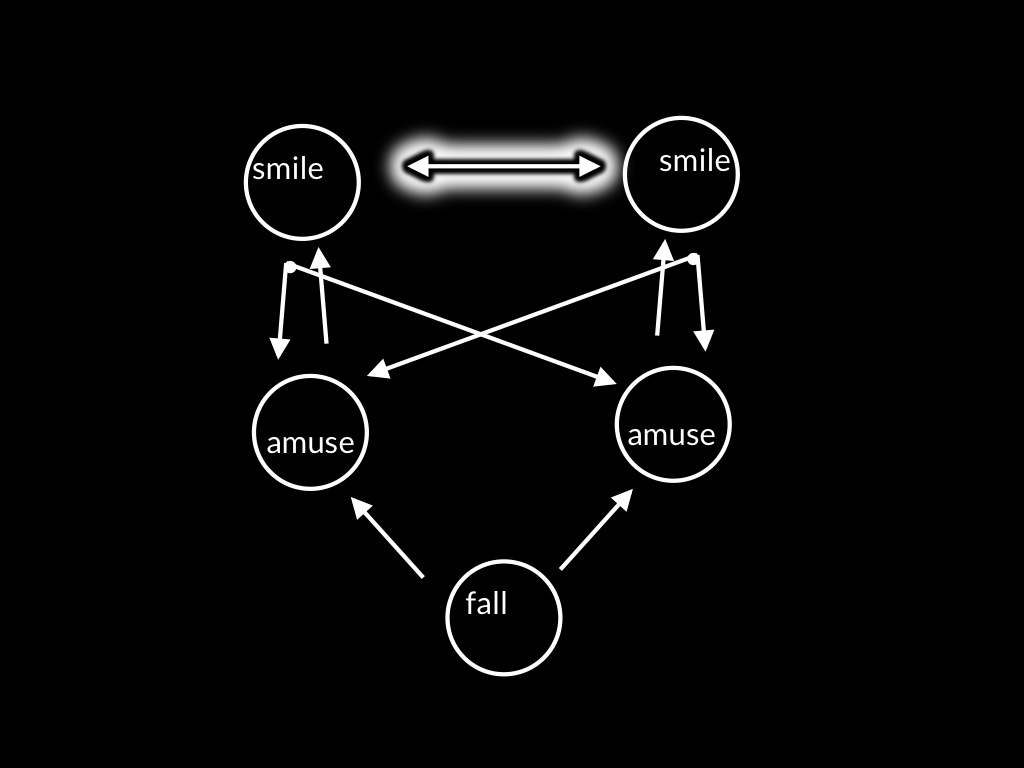
First, the way your smile unfolds is shaped by how mine unfolds and conversely.
I also suppose that our smiles can be minutely coordinated with each other.
But it’s not just that our smiles are interdependent in this way ...
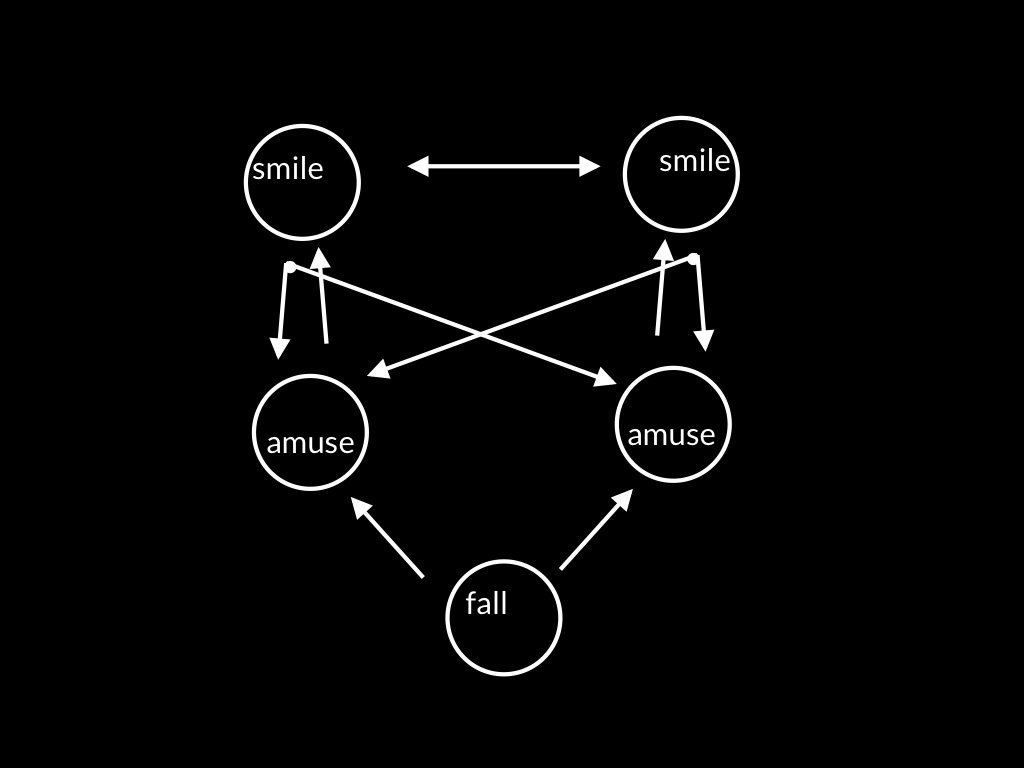
It’s also that each of our smiles is shaping the way our amusement unfolds.
So the way your amusement unfolds is being controlled by, and controlling, the way mine unfolds.
In sharing a smile, we are emotionally locked together.
[*todo: remove motor stuff for this talk! Also: don't lose sight of idea that control is a way of knowing.]
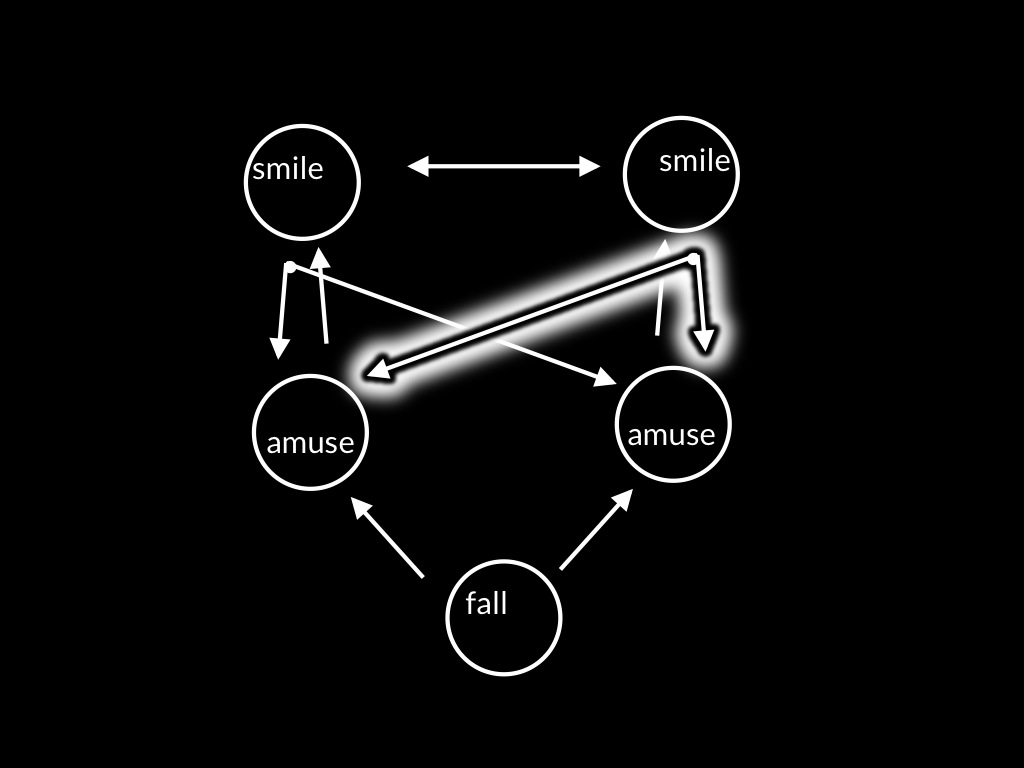
[*todo: need slide with control arrows highlighted (my emotion controls yours).]
[*Structure:
(i) I know because my emotion controls yours;
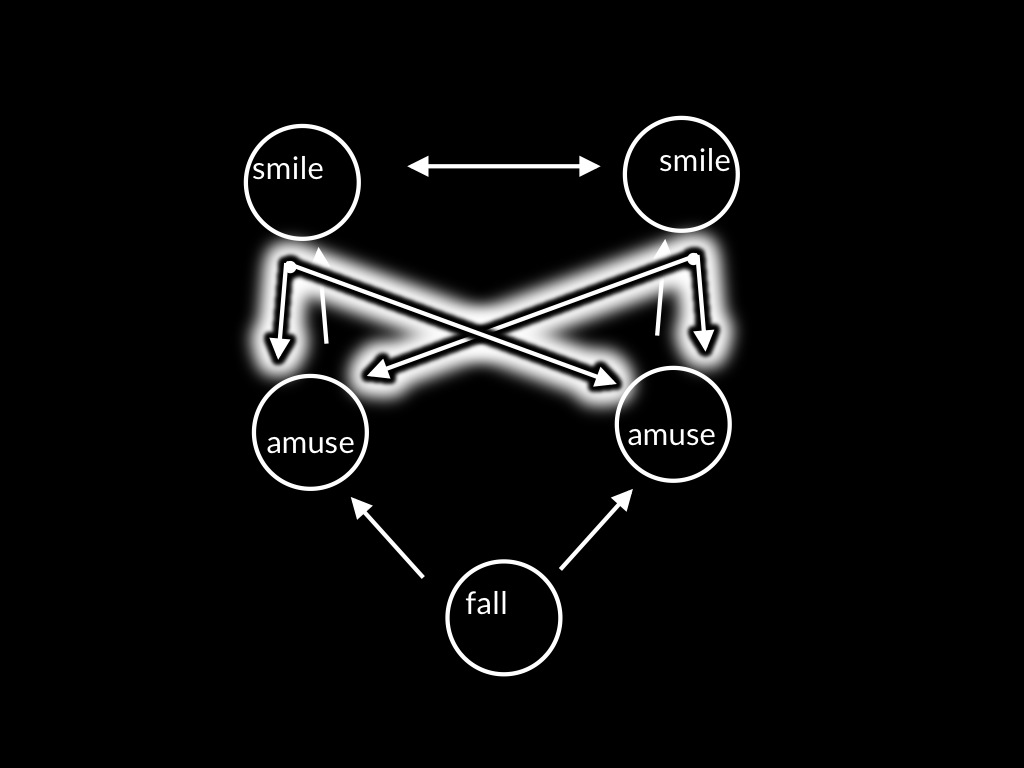
(ii) But if my emotion controls yours, how can yours be amusement at the clown's falling? because control is partial, and reciprocal;
(iii) But the mere fact of control isn't enough for knowledge; rather, control must show up in experience somehow.
After all, for all I have said so far, we might, in sharing a smile, be unaware that our emotions are locked together.
(iv) There must be an experience that is distinctive of sharing a smile.
(iv) Note that I don’t want to say that someone who is sharing a smile needs to understand the situation in the way I’m describing it.
All I'm claiming is that the fact of reciprocal control somehow affects our awareness.
(v) It may affect in our awareness insofar as we are sensitive to contingencies between our own actions' and others' actions,
and between our actions and the causes of them.
(vi) So my position is this: the reciprocal control justifies each agent in making judgements about how the others' amusement is unfolding,
and this justification is at least indirectly available to the agents by virtue of their having experiences characteristic of sharing a smile.
]
Our being emotionally locked together means that
to a significant extent I am feeling what you are feeling,
that the way my amusement is unfolding matches they way your amusement is unfolding.
So if you know how your own amusement is unfolding and you know that we are emotionally locked together,
you can know much about how my amusement is unfolding.
So joint expressions of emotion like sharing a smile have the potential to enable us to know not just that others are amused but how their amusement is unfolding.
But the fact of reciprocal control (which means our emotions are locked together) together doesn’t all by itself mean that we can know how each other’s emotions are unfolding.
After all, for all I have said so far, we might, in sharing a smile, be unaware that our emotions are locked together.
Now you might think this sounds implausible because its hard to imagine sharing a smile without an experience that is distinctive of sharing a smile.
And it might be natural to describe this experience as an experience of sharing.
But even if that is correct, it’s necessary to say exactly why someone who is sharing a smile is in a position to know things about how the other’s emotion is unfolding.
I don’t want to say that interaction only helps if you know that your emotions are locked together.
That is, I don’t want to say that someone who is sharing a smile needs to understand the situation in the way I’m describing it.
But minimally the fact of reciprocal control must somehow feature in our awareness.
[*The idea in outline:
\begin{enumerate}
\item the ways our amusements unfold is locked together
\item this is in part because a single motor plan has two functions, production of your smile and prediction of my smile
\item the single motor process means that we might experience being locked together in some way (not that our emotions are locked together but that our actions are, in something like (but not exactly) we experience actions when seeing ourselves in a mirror or on CCTV (check Johannes’ discussion of this)).
\end{enumerate}
]
Here I want to offer a wild conjecture.
In joint expressions of emotion there is a single motor plan with two functions,
production and prediction.
The motor plan both produces your own smile and enables you to predict the way the other’s smile will unfold.
[*missing step about monitoring and experience. (The Haggard idea: motor planning can give rise to experiences concerning one's own actions \citep{Haggard:2005sc}.)]
Because your plan has this dual function, your experience of the other’s (my?) smile is special.
From your point of view, it is almost as if the other is smiling your smile.%
\footnote{
Joel caricatured this idea seeing me eating fruit: ‘it’s almost as if I’m eating that fruit.’
}
This means that sharing a smile has characteristic phenomenology.
This odd phenomenological effect means that in sharing a smile we can each think of the situation almost as if there were a single smile.
And almost as if there were a single state of amusement.
(In thinking of the situation like this it is important that we have a subject-neutral conception of the amusement and an agent-neutral conception of the smile.%
\footnote{
Tom Smith asked about this. I clarified that I wasn’t suggesting there was a state of amusement which is ours, nor that the subjects are thinking of the situation in this way.
That’s the point of the appeal to subject-neutral amusement.
It’s a partial model of the situation.
}
[*Here I think I’m shifting back from the perspective of the participants in sharing a smile to the perspective of the theorist.
Probably what I should say is, first, that a theorist can think of the situation in this way and use this to argue, second, that there is a simple, partial conception of the situation that doesn’t require understanding reciprocal control and interlocking emotions but is sufficient for each smiler to have knowledge of the way the other’s emotion unfolds.]
So my suggestion is that in sharing a smile you experience my smile almost as if it were yours (or: you experience me almost as if I were smiling your smile),
and so you might also experience our situation almost as if it involved a single state of amusement.
It's more like we each plan a single smile.
But---to reply to the objection---these plans have a dual function.
Your plan both produces your own smile and enables you to simulate---to experience---my smile.
And likewise for my plan.
The interdependence of our smilings means that we could each think of the situation as if it were one in which a single state of amusement were responsible for our actions.

Development of Joint Action: Planning
\section{Development of Joint Action: Planning}
\section{Development of Joint Action: Planning}
When are humans
first able to do what Bratman calls ‘interconnected planning’?

challenge
Explain the emergence of sophisticated human activities including referential communication
and mindreading.
conjecture
Joint action plays a role in explaining how sophisticated human activities emerge.
objection
Joint action presupposes mindreading at the limits of human abilities.
So I think Carpenter is saying: the objection is correct, and we should reject
the conjecture.

Paulus et al, 2016 figure 1
Task: give the tool to another person, who needs to put the spherical end
into the box. (Tip: you need to grasp it by the spherical end and pass it
so that the other takes the cube-end; they can then insert it optimally.)
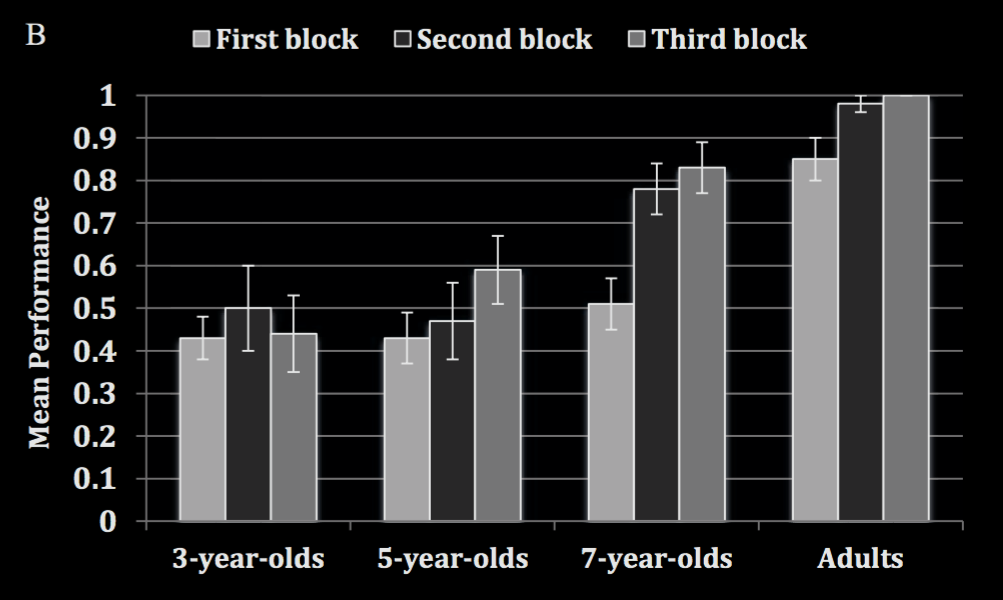
Paulus et al, 2016 figure 2B
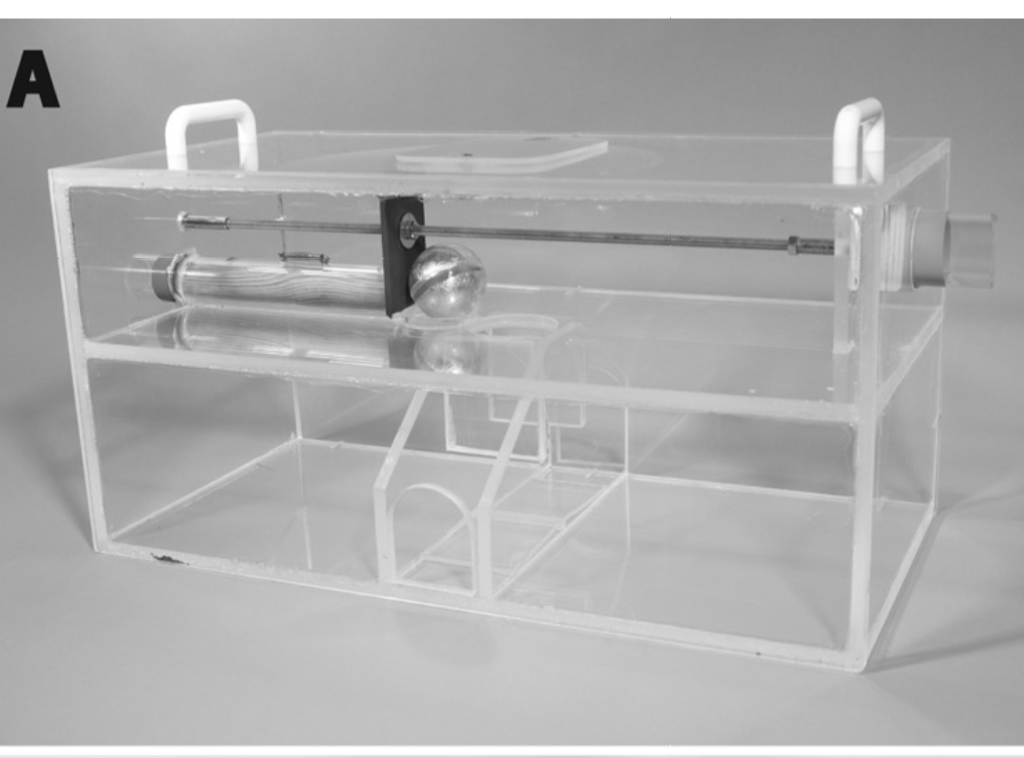
Warneken et al, 2014 figure 1A
‘One child had to insert the turn-tool on the right of the apparatus and
then turn so that the metal rod stretching across moved the panel out of
the way of the ball. The other person could then insert the push tool on
the left, pushing the silver ball into the hole similar to a billiard cue.’
\citep{warneken:2014_young}
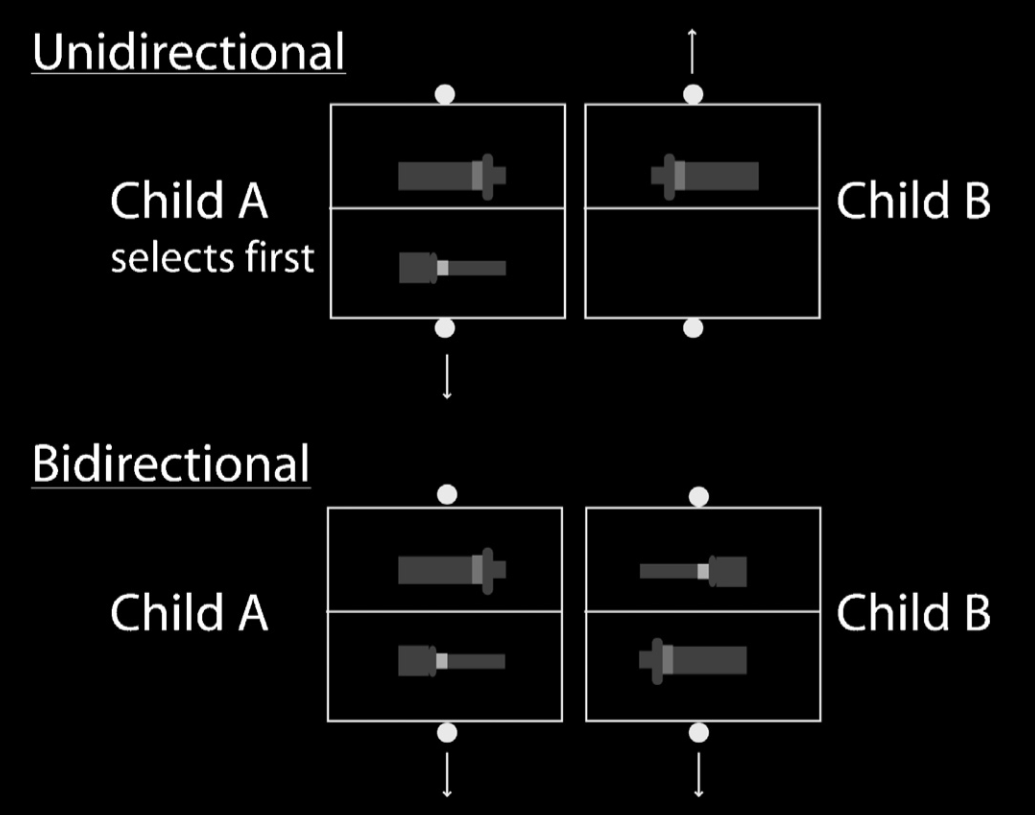
Warneken et al, 2014 figure 2
Unidirectional : child A has to select the tool that B doesn’t have.
Bidirectional : child A can select either tool.
‘(a) Unidirectional: The left box will be opened first. Only the left
child has a choice. For success, this child has to choose the push tool
(lower left: thick handle, long thin top). The partner child has to
retrieve the only available turn tool (upper right: thick handle, short
thin top).’
\citep{warneken:2014_young}
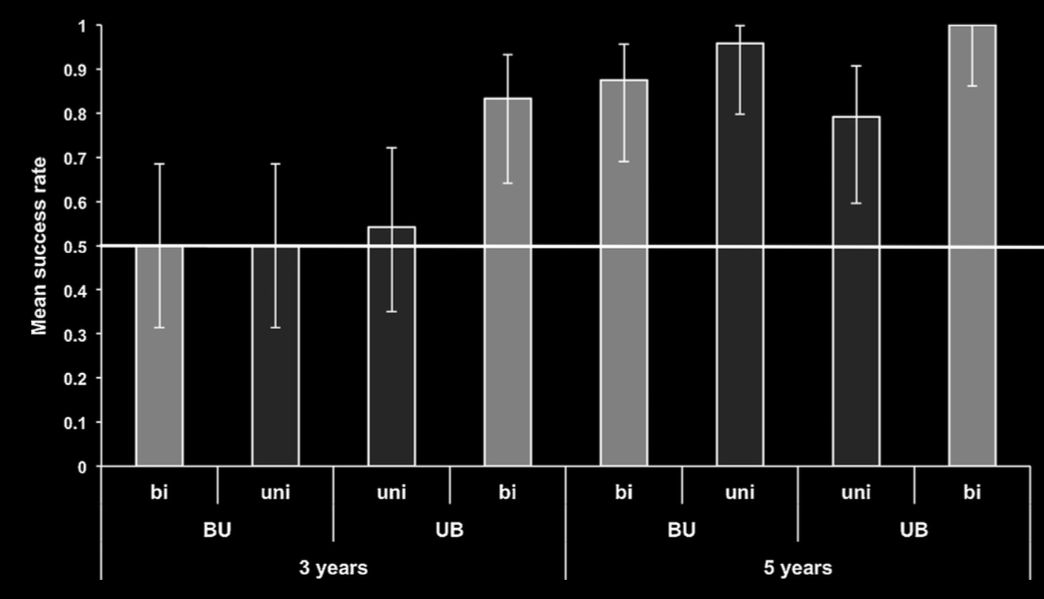
Warneken et al, 2014 figure 3
BU - first bidirectional then unidirectional.
The three year olds are hopeless in all conditions except the bidirectional
condition when they have first had the unimanual condition.
So there is no forward planning, but there is some evidence that three-year-olds
can take into account what another has done.
‘by age 3 children are able to learn, under certain circumstances, to take
account of what a partner is doing in a collaborative problem-solving
context. By age 5 they are already quite skillful at attending to and even
anticipating a partner’s actions’ \citep[p.~57]{warneken:2014_young}.

Meyer et al, 2016 figure 1A
Child pass cups to adult who has one had occupied. Adult and child separated by
glass window, so have to reach around.
‘Example of a 3-year-old child engaged in the joint-action task with an
adult experimenter. (Top) The start of a trial in which the child has a cup
and sees the experimenter holding the cup tower in her left hand. The lower
two images illustrate the different possible response choices of the child.
The child chooses in one trial to pass the cup on the side that is
accommodating the other’s actions (middle); and in another trial, on the
side that is not accommodating the execution of the partner’s actions
(bottom).’ \citep{meyer:2016_planning}
‘To build one tower, children had to pass five cups. Then the experimenter
introduced the next hand puppet with the same procedure. With each
change of hand puppet, she switched sides by putting the puppet on her
previously free hand ... in total four towers were built, two on each
side.’ \citep{meyer:2016_planning}

Meyer et al, 2016 figure 1B

Meyer et al, 2016 figure 1C
Meyer et al, 2016 figure 2
‘two measures of interest: the initial response choice (i.e. the first
trial only) and the continuous response choice (i.e. all trials except the
first)’ \citep{meyer:2016_planning}
‘In their initial response choice, children had to plan ahead without
having experienced how their own action would affect their joint- action
partner. Thus, the initial response choice reflects whether children
proactively planned to accommodate their joint-action partner.’ \citep{meyer:2016_planning}
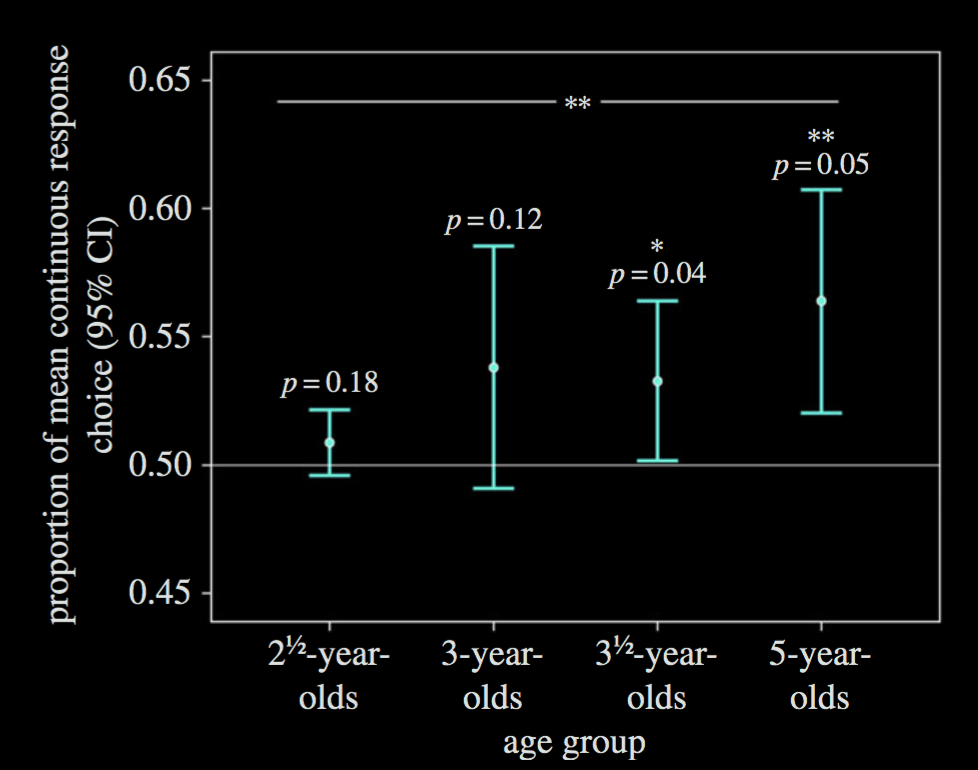
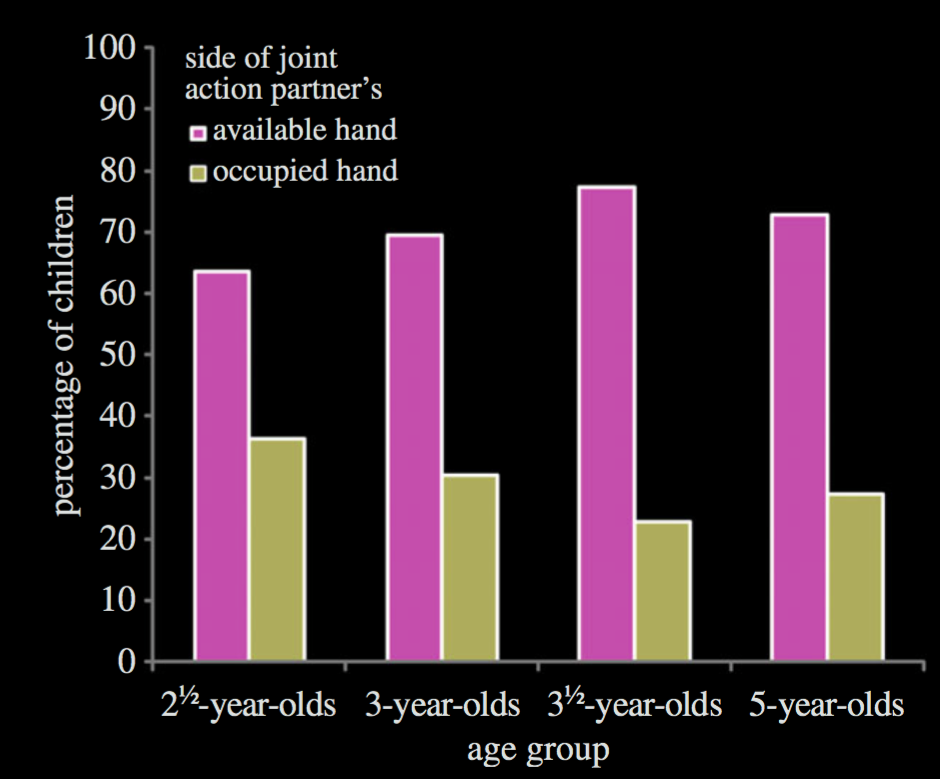
Meyer et al, 2016 figure 3
3-year-olds and younger: not good at changing the side they pass the object on
to take into account where the other will reach it.
‘children proactively plan their actions in a way that accommodates the actions of
their partner early in childhood. By contrast, the flexible adjustment of
their action plans to their partner only begins to develop in the fourth and
fifth year of life. Notably, even at the age of 5 children only adjusted their
action plans to a surprisingly small degree’ \citep[p.~8]{meyer:2016_planning}.
I think: the good results on the initial response choice at all ages suggest that some
ability to take into account another’s immediate future actions may already be present
at 2-and-a-half years of age (although this is not strong evidence).
Note that the success concerns anticipating ACTIONS not antcipating PLANS.

Gerson et al, 2016 figure 1B
Subjects: three-year-olds.
Four balls, four egg cups.
Yellow balls must go in yellow egg cups, brown balls likewise.
One ball is brown and yellow and can go in either colour egg cup.
But you only have four egg cups, so you have to put it in whatever egg cup
will enable you to place the other three balls correctly.
Experiment: compare performance in an individual condition (child does all)
with performance in a joint condition (child alternates with puppet) and
a control condition with a machine (not joint action, but similar turn-taking
required.)
‘The joint play session consisted of nine trials. In the first, fourth, and
seventh trial, Kip let the child place the first (and third) ball and Kip
placed the second (multi-colored) and fourth ball. Kip always placed the
multi-colored ball in the cup that allowed all forthcoming balls to be
placed correctly. In the other six trials, Kip placed the first and third
balls and the child placed the second and fourth balls. This ensured that
the number of trials for which the child had to plan (by placing the
multi-colored ball correctly) was matched across the individual and joint
conditions.’ \citep{gerson:2016_social}
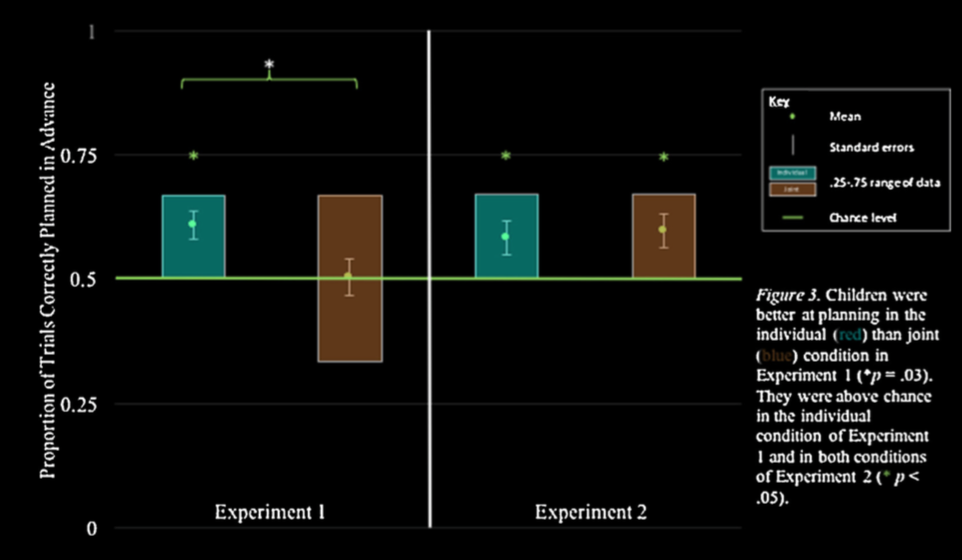
Gerson et al, 2016 figure 3
Results: When acting alone or alternating with a machine,
three-year-olds were above chance at selecting the correct egg cup for the
two-coloured ball. But in joint action they were not above chance,
and their performance was significantly worse than when acting alone.
The results indicate that
‘proactive planning for two individuals, even
when they share a common goal, is more difficult than planning ahead solely
for oneself’ \citep[p.~128]{gerson:2016_social}.
challenge
Explain the emergence of sophisticated human activities including referential communication
and mindreading.
conjecture
Joint action plays a role in explaining how sophisticated human activities emerge.
objection
Joint action presupposes mindreading at the limits of human abilities.
So with respect to our overall line of enquiry,
it may still be possible to hold on to the conjecture if we can
overcome the objection.

Development of Joint Action: Years 1-2
\section{Development of Joint Action: Years 1-2}
\section{Development of Joint Action: Years 1-2}
What (if any) joint actions are humans capable of just at the point they are beginning to
communicate referentially (typically around the first birthday)?
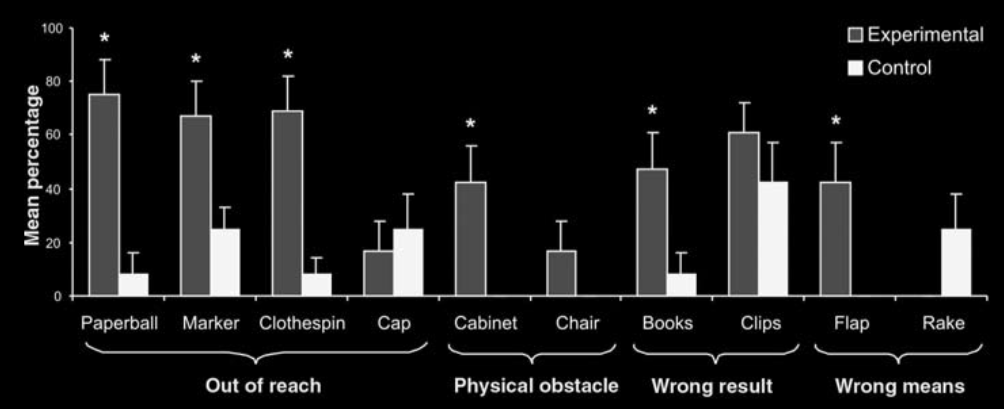
Warneken and Tomasello, 2006
From \citep{Warneken:2006bs}.
In the control condition, the human gave no signal of needing help. (‘For
each task, there was a corresponding control task in which the same basic
situation was present but with no in- dication that this was a problem for
the adult (14). This ensured that the infant_s motivation was not just to
reinstate the original situation or to have the adult repeat the action,
but rather to actually help the adult with his problem. ... In control
trials, he looked at the object with a neutral facial expression for 20 s.
In no case did the infant receive any benefit (reward or praise) for
helping. Each individual was tested in all 10 tasks, a subsample of 5 tasks
administered as experimental and 5 as control conditions (in systematically
varied order).’)
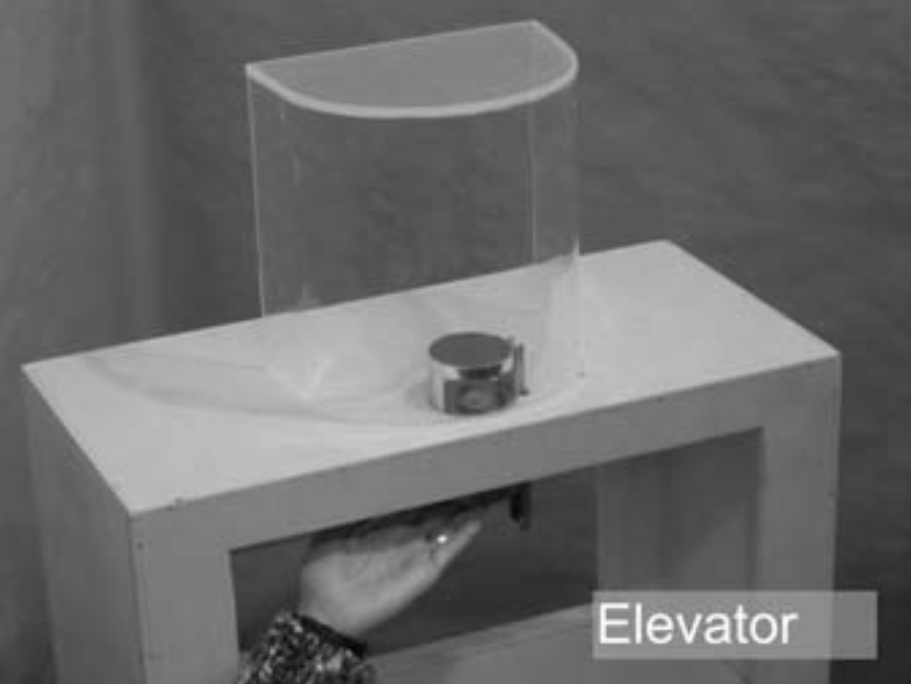
Warneken and Tomasello, 2007 figure 2 (part)
Ages: 14, 18 and 24 months.
Elevator task: free an object from a cylinder.
Two roles. Role A: position yourself in the right
location to retrieve the target object. Role B: push up the cylinder
and hold it in place while another retrieves it.
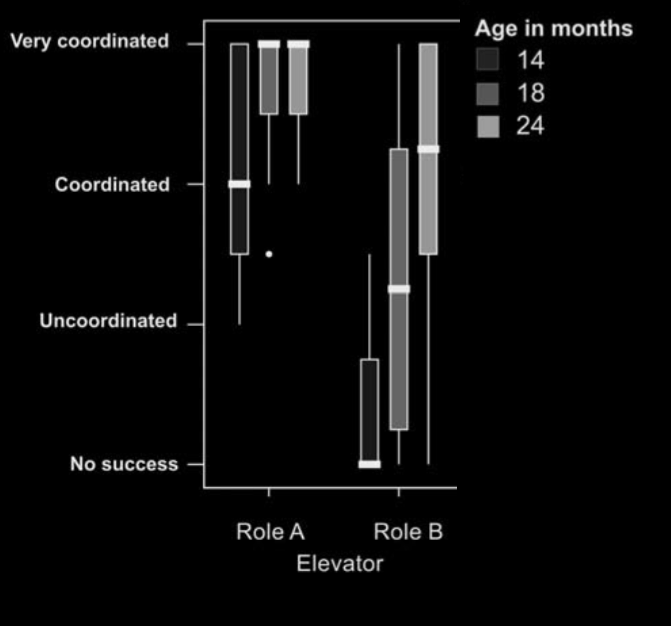
Warneken and Tomasello, 2007 figure 3 (part)
‘The 14-month-olds of this study displayed coordinated behaviors in the
elevator task Role A of positioning themselves in the right location and
retrieving the target object from the cylinder when the partner pushed it
up, but they had major problems performing Role B, pushing the cylinder up
and holding it in place until the partner could fetch the object. If they
pushed up the cylinder at all, they would repeatedly drop it when the other
person was just about to take the object out’ \citep{warneken:2007_helping}.
\citet[p.~200]{brownell:2011_early} comment:
‘Across these non-routine tasks, 18-month olds’ behavior with the adult
partner was rated as predominantly “uncoordinated” (vs. “coordinated” or
“very coordinated”) and the children exhibited “low” cooperative engagement
(vs. “medium” or “high”). On those tasks requiring children to anticipate
the partner’s actions and to adjust their behavior accordingly, 18-month
olds’ performance did not differ from chance. By age two, children operated
at “medium” levels of cooperative engagement and were above chance in
anticipating and coordinating their behavior with the adult.’
‘social coordinations show a marked improvement between children at 14 and
18 months of age’ \citep{warneken:2007_helping}.

Warneken and Tomasello, 2007 figure 2 (part)
Trampoline task: first bounce a cube on the trampoline with an experimenter,
then experimenter pauses and we measure child’s attempts to re-engage.
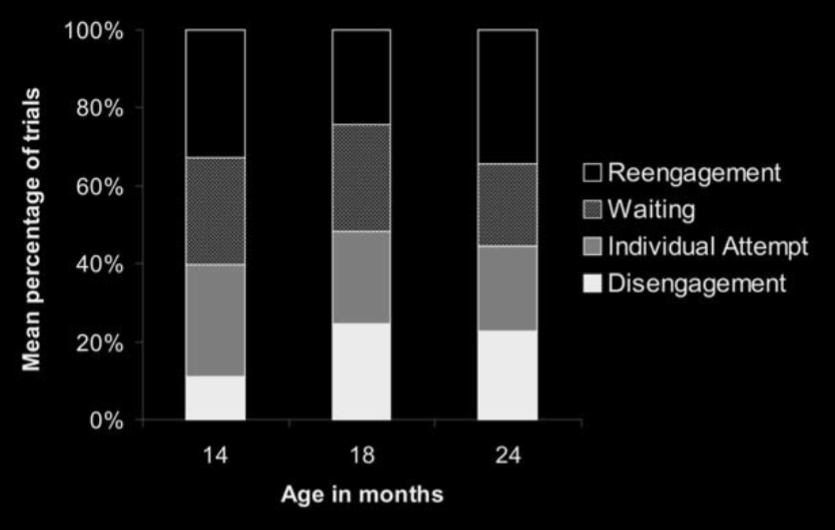
Warneken and Tomasello, 2007 figure 4
The re-engagement is a powerful signal that children