Consider the statement, ‘The injections saved her life.’
This could be true in virtue of her receiving several injections on different occasions, each of
which saved her life.
In this case, the injections saving her life is just a matter of each injection individually
saving her life; this is the distributive interpretation.
But the statement is also true if she was given two injections on a single occasion where each
injection was necessary but not sufficient to save her life.
In this case the injections saving her life is not, or not just, a matter of each injection
individually saving her life; this is the collective interpretation.
The difference between distributive and collective interpretations is clearly substantial, for on
the distributive interpretation the statement can only be true if her life has been saved more
than once, whereas the truth of the collective interpretation requires only one life-threatening
situation.
Just as some injections can be collectively life-saving, so some actions can be collectively
directed to a goal.
For example, consider this sentence:
‘The goal of their actions is to find a new home.’
This can be interpreted distributively: each of their actions is separately
directed to finding a new home.
But it can also be interpreted collectively: finding a home is an outcome to which
their actions are directed and this is not, or not just, a matter of each of their actions being
individually directed to finding a home.
To say that an outcome is a \emph{collective goal} of some actions is just to say that
it is an outcome to which the actions are directed and this is not, or not just, a matter of
each action being individually directed to that outcome.
Note that collective goals do not plausibly require any kind of intentions or commitments.
After all,
there is a sense in which some of the actions of swarming bees are directed to finding a nest
and this is not, or not just, a matter of each bee’s actions being individually directed to
finding a nest. So finding a nest is a collective goal of the bees’ actions.
\section{Collective Goals and Motor Representations}
\section{Collective Goals and Motor Representations}
Motor representations can ground collective goals in this sense:
in some cases, two or more actions involving multiple agents have a
collective goal in virtue of the actions being appropriately related to an
interagential structure of motor representations.
Motor representations concern not only bodily configurations and movements but also more distal outcomes such as the grasping of a mug or the pressing of a switch \citep{butterfill:2012_intention,hamilton:2008_action,cattaneo:2009_representation}.
Some motor processes are planning-like in that they involve deriving means by which the outcomes could be brought about and in that they involve coordinating subplans \citep{jeannerod_motor_2006,zhang:2007_planning}.
Motor processes concerning actions others will perform occur in observing others act \citep{Gangitano:2001ft}---and even in observing several others act jointly \citep{manera:2013_time}---and enables us to anticipate their actions \citep{ambrosini:2011_grasping,aglioti_action_2008}.
In joint action, motor processes concerning actions another will perform can occur \citep{kourtis:2012_predictive, meyer:2011_joint},
and can inform planning for one's own actions \citep{vesper:2012_jumping,novembre:2013_motor,loehr:2011_temporal}.
In some joint actions, the agents have a single representation of the whole action (not only separate representations of each agent's part) \citep{tsai:2011_groop_effect,loehr:2013_monitoring,Menoret:2013fk},
and may each make a plan for both their actions \citep{meyer:2013_higher-order,kourtis:2014_attention}.
An interagential structure of motor representation: \begin{enumerate} \item there is an outcome to which a joint action could be collectively directed and in each agent there is a motor representation of this outcome; \item these motor representations trigger planning-like processes in each agent which result in plan-like hierarchies of motor representations; \item the plan-like hierarchy in each agent involves motor representations concerning another's actions as well as her own; \item the plan-like hierarchies of motor representations in the agents nonaccidentally match. \end{enumerate}
\section{Motor Representation}
A \emph{goal} is an outcome to which an action is directed.
Motor representations represent goals such as the grasping of an egg or the pressing of a switch.
These are outcomes which might, on different occasions, involve very different bodily configurations
and joint displacements (see \citealp{rizzolatti_functional_2010} for a selective review).
Motor representations trigger processes which are planning-like insofar as they involve (a) computing
means from representations of ends; and (b) satisfying relational constraints on actions.
In virtue of what do actions involving multiple agents ever have collective goals?
Recall how Ayesha takes a glass and holds it up while Beatrice pours prosecco;
and unfortunately the prosecco misses the glass, soaking Zachs’s trousers.
Ayesha might say, truthfully, ‘The collective goal of our actions was not to soak Zach's trousers in
sparkling wine but only to fill this glass.’
What could make Ayesha’s statement true?
As this illustrates,
some actions involving multiple agents are purposive in the sense that
among all their actual and possible consequences,
there are outcomes to which they are directed
and the actions are collectively directed to this outcome
so it is not just a matter of each individual action being directed to this outcome.
In such cases we can say that the actions have a collective goal.
As what Ayesha and Beatrice are doing---filling a glass together---is a paradigm case of joint action, it might seem natural to answer the question by invoking a notion of shared (or `collective') intention.
Suppose Ayesha and Beatrice have a shared intention that they fill the glass.
Then, on many accounts of shared intention,
the shared intention involves each of them intending that they, Ayesha and Beatrice, fill the glass;
or each of them being in some other state which picks out this outcome.
The shared intention also provides for the coordination of their actions (so that, for example,
Beatrice doesn't start pouring until Ayesha is holding the glass under the bottle). And
coordination of this type would normally facilitate occurrences of the type of outcome intended.
In this way, invoking a notion of shared intention provides one answer to our question about what
it is for some actions to be collectively directed to an outcome.
Are there also ways of answering the question which involve psychological structures other than shared intention? In this paper we shall draw on recent discoveries about how multiple agents coordinate their actions to argue that the collective directedness of some actions to an outcome can be explained in terms of a particular interagential structure of motor representations.
Our actions having collective goals is not always only a matter of what we intend: sometimes it constitutively involves motor representation.
What about the Simple View Revised?
At this point I want to return to considering Simple View Revised.
So far I haven’t offered an objection directly to this view.
Simple View
Two or more agents perform an intentional joint action exactly when there is an act-type, φ, such that each agent intends that they, these agents, φtogether and their intentions are appropriately related to their actions.
Simple View Revised
... and
we engage in parallel planning;
for each of us, the intention that we, you and I, φ together leads to action via
our contribution to the parallel planning
(where the intention, the planning and
the action are all appropriately related).
Parallel planning means that the Simple View Revised provides one explanation
of how it is that our actions could have a collective goal.
[for later: link between iasmr and parallel planning (same structure)]
Few discussions of joint action have considered the existence of
Very Small Scale Shared Agency ...
Very Small Scale Shared Agency
A \emph{very small scale action} is one that is typically distantly related
as a descendent by the means-end relation to the actions which are
sometimes described as ‘small scale’ actions, such as playing a sonata,
cooking a meal or painting a house \citep[e.g.][p.~8]{bratman:2014_book}.
There are very small scale joint actions like playing a chord together in the
course of playing a duet,
clinking glasses in the course of toasting our success,
or plassing a plate between us in the course of doing the washing up together.
Small Scale Shared Agency
Very Small Scale Shared Agency
Playing a piano duet
Playing a chord together
Toasting our success together
Clinking glasses
Washing up together
Passing a plate between us
Philosophers have rarely considered such very small scale joint actions.
But at least some such cases seem to involve exercising shared agency no less
than larger scale activities like painting a house together.
But very small scale joint actions create a challenge to
views like Gilbert’s.
Those views
hinge on the roles of intention and practical reasoning.
But in at least some cases, very small scale joint actions are
not a consequence of practical reasoning concerning those particular actions,
nor need they involve intentions which specify outcomes to which the very
small scale joint actions are directed.
There is simply no need for practical reasoning, or intention, in many such cases.
This is particularly obvious if you think about very small scale joint actions
which occur in the context of larger scale activities, such as our playing a chord
in the course of playing a piano duet.
Of course, there is no principled bar to having intentions concerning the goals of
such very small scale actions (as far as I know), and such intentions may sometimes exist.
But in very small scale cases of acting together, intentions and practical reasoning
are often superfluous and sometimes absent.
Despite this, these very small scale interactions appear to involve exercises
of shared agency no less than small scale activities such as playing a piano duet.
For very small scale cases, in virtue of what might they have collective goals?
motor representations represent outcomes and trigger planning-like processes
Let me mention some almost uncontroversial facts about motor representations and
their action-coordinating role.
Suppose you are a cook who needs to take an egg from its box, crack it and put it (except for the
shell) into a bowl ready for beating into a carbonara sauce.
Even for such mundane, routine actions, the constraints on adequate performance can vary
significantly depending on subtle variations in context. For example, the position of a hot pan
may require altering the trajectory along which the egg is transported, or time pressures may mean
that the action must be performed unusually swiftly on this occasion.
Further, many of the constraints on performance involve relations between actions occurring at
different times.
To illustrate, how tightly you need to grip the egg now depends, among other things, on the forces
to which you will subject the egg in lifting it later.
It turns out that people reliably grip objects such as eggs just tightly enough across a range of
conditions in which the optimal tightness of grip varies.
This indicates (along with much other evidence) that information about the cook’s anticipated
future hand and arm movements appropriately influences how tightly she initially grips the egg
(compare \citealp{kawato:1999_internal}).
This anticipatory control of grasp,
like several other features of action performance (\citealp[see][chapter 1]{rosenbaum:2010_human} for more examples),
is not plausibly a consequence of mindless physiology, nor of intention and practical reasoning.
This is one reason for postulating motor representations, which characteristically play a role in
coordinating sequences of very small scale actions such as grasping an egg in order to lift it.
The scale of an actual action can be defined in terms of means-end relations.
Given two actions which are related as means to ends by the processes and representations
involved in their performance, the first is smaller in scale than the second just if the
first is a means to the second. Generalising, we associate the scale of an actual action
with the depth of the hierarchy of outcomes that are related to it by the transitive closure
of the means-ends relation. Then, generalising further, a repeatable action (something that
different agents might do independently on several occasions) is associated with a scale
characteristic of the things people do when they perform that action. Given that actions
such as cooking a meal or painting a house count as small-scale actions, actions such as
grasping an egg or dipping a brush into a can of paint are very-small scale. Note that we
do not stipulate a tight link between the very small scale and the motoric. In some cases
intentions may play a role in coordinating sequences of very small scale purposive actions,
and in some cases motor representations may concern actions which are not very small scale.
The claim we wish to consider is only that, often enough, explaining the coordination of
sequences of very small scale actions appears to involve representations but not, or not
only, intentions. To a first approximation, \emph{motor representation} is a label for
such representations.%
\footnote{%
Much more to be said about what motor representations are; for instance, see \citet{butterfill:2012_intention} for the view that motor representations can be distinguished by representational format.
}
What do motor representations represent? An initially attractive, conservative
view would be that they represent bodily configurations and joint displacements,
or perhaps sequences of these, only.
However there is now a significant body of evidence that some motor representations
do not specify particular sequences of bodily configurations and joint displacements,
but rather represent outcomes such as the grasping of an egg or the pressing of a switch.
These are outcomes which might, on different occasions, involve very different bodily
configurations and joint displacements
(see \citealp{rizzolatti_functional_2010} for a selective review).
Such outcomes are abstract relative to bodily configurations and joint displacements
in that there are many different ways of achieving them.
Motor representations make very small scale actions the actions they are.
Which very small scale action you are performing or attempting to perform---for example,
which phoneme you are articulating or attempting to articulate---is a matter of which
outcomes are specified by the motor representations controlling your action.
Relatedly, motor representations can trigger processes which are like planning in some respects.
These processes are planning-like in that they involve starting with representations of relatively distal outcomes and gradually filling in details, resulting in motor representations that can be hierarchically arranged by the means-end relation \citep{bekkering:2000_imitation,grafton:2007_evidence}.
Some processes triggered by motor representations are also planning-like in that they involve meeting constraints on the selection of means by which to bring about one outcome that arise from the need to select means by which, later, to bring about another outcome \citep{jeannerod_motor_2006, zhang:2007_planning, rosenbaum:2012_cognition}.
Conjecture : collective goals are represented motorically
\begin{enumerate}
\item There is one outcome which each agent represents motorically, and
\item in each agent this representation triggers planning-like processes
\item concerning all the agents’ actions, with the result that
\item coordination of their actions is facilitated.
\end{enumerate}
Let me explain what this amounts to.
I.e. sometimes, when two or more actions involving multiple agents are, or need to be, coordinated:
Each represents a single outcome motorically, and
in each agent this representation triggers planning-like processes
concerning all the agents’ actions, with the result that
coordination of their actions is facilitated.
Each represents a single outcome motorically, and
in each agent this representation triggers planning-like processes
concerning all the agents’ actions, with the result that
coordination of their actions is facilitated.
What do we need?
(i) Evidence that a single outcome to which all the actions are directed is represented motorically.
(ii) Evidence that this triggers planning-like processes,
(iii) where these concern all the agents' actions,
and (iv) the existence of such representations facilitates coordination of the agents' actions.
\section{Kourtis et al (2014)}
So far I've been providing some evidence for the conjecture that collective goals are represented motorically.
It’s important to stress that is is only one bit of the evidence. There’s quite a bit more.
Conjecture : collective goals are represented motorically
I.e. sometimes, when two or more actions involving multiple agents are, or need to be, coordinated:
Each represents a single outcome motorically, and
in each agent this representation triggers planning-like processes
concerning all the agents’ actions, with the result that
coordination of their actions is facilitated.
In particular the evidence I have provided doesn’t address the issue of coordination.
There is a little bit of direct evidence for this that I won't mention.
And of course much more evidence would be needed before we could regard the conjecture as established.
In virtue of what do actions involving multiple agents ever have collective goals?
Recall how Ayesha takes a glass and holds it up while Beatrice pours prosecco;
and unfortunately the prosecco misses the glass, soaking Zachs’s trousers.
Ayesha might say, truthfully, ‘The collective goal of our actions was not to soak Zach's trousers in
sparkling wine but only to fill this glass.’
What could make Ayesha’s statement true?
cooperation?
So much for motor representation. How does this relate to cooperation?
Earlier I suggested that
Purposive actions are cooperative to the extent that, for each agent, her
performing these actions rather than any other actions depends in part on how good
an overall pattern of trade-offs between demandingness and well-suitedness can be achieved
for all of the actions.
Now I want to suggest that
Where we each represent a collective goal motorically,
our actions will normally be cooperative in this sense.
Why is this true?
Motor representation of collective goal in each of us.
In each of us, the motor representation triggers a process which results in a plan-like
structure of motor representations.
These motor representations concern all of our actions, yours and mine.
These motor representations are agent-neutral. The motor process constructs the plan-like
structure in such a way as to achieve a good pattern of trade offs between demandingness
and well-suitedness across all of the actions, yours and mine.
Further, because humans are quite similar motorically, in many situations our motor
plans will nonaccidentally match. That is, they will be identical or be such that differences
between them do not matter to our coordination.
So the actions you perform will have been selected in part because they enable a good
balance of pattern of trade offs between demandingness and well-suitedness across all of
our actions, yours and mine.
And this is just what cooperation requires.
[ALT: ...]
Because in the sort of parallel-planning triggered by the motor representations in
an interagential structure of motor representations, there is no distinction
between actions I will perform and actions you will perform.
I am, in effect, just trying to work out the best way to achieve the outcome irrespective
of who does what; and so are you; and this is the hallmark of effective cooperation.
To illustrate, consider a case where I grasp a mug and pass it to you.
Considering just my action, let’s say it is most comfortable for me to grasp the mug by the handle.
But this would force you to grip the mug awkwardly, making the overall awkwardness of our
action very high.
If our actions are cooperative, I will attempt to reduce the overall awkwardness by
grasping the mug in a way that is slightly less awkward for me.
And
I am likely not to grasp it by
the handle \citep{meyer:2013_higher-order}.
Instead, I will adopt a more awkward
Where we each represent a collective goal motorically, our actions will normally be cooperative.
Limit: very small scale joint actions
What’s exciting isn’t that all cooperation involves motor representations.
It’s that mere motor representation makes any cooperative actions possible at all.
Cooperative action isn’t something that depends on terribly sophisticated notions like
shared intention or joint commitment. It begins with the motoric.
\textbf{A certain interagential structure of motor representation
is among the things which can enable humans to cooperate.}
In virtue of what do very small scale joint actions have collective goals?
Interagential structures of motor representations.
In virtue of what are very small scale joint actions ever trade-off cooperative?
Interagential structures of motor representations.
Conjecture : collective goals are represented motorically
I.e. sometimes, when two or more actions involving multiple agents are, or need to be, coordinated:
Each represents a single outcome motorically, and
in each agent this representation triggers planning-like processes
concerning all the agents’ actions, with the result that
coordination of their actions is facilitated.
There is more evidence for this conjecture than I have given here,
but there is not a lot more converging evidence.
This is a conjecture that we hope will be tested further
rather than something we take to be established already.
What about coordination?
There is a little bit of direct evidence for this that I won't mention.
But I do want to take you through why the interagential structure of motor representation
might in theory result in the agents actions being coordinated.
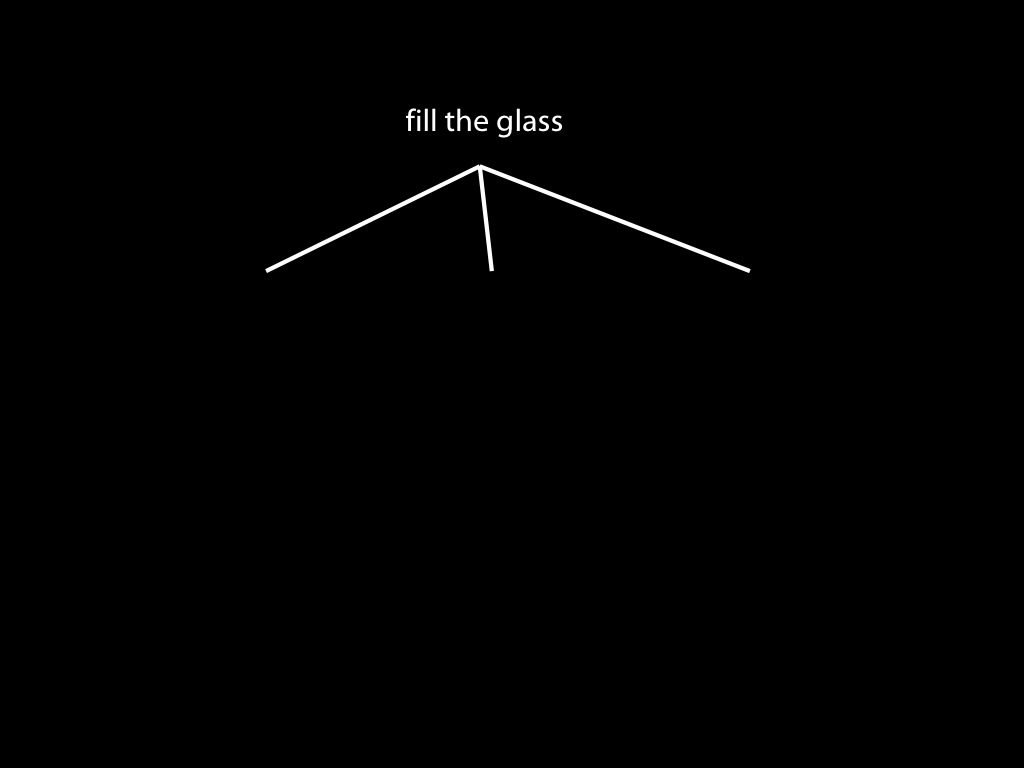
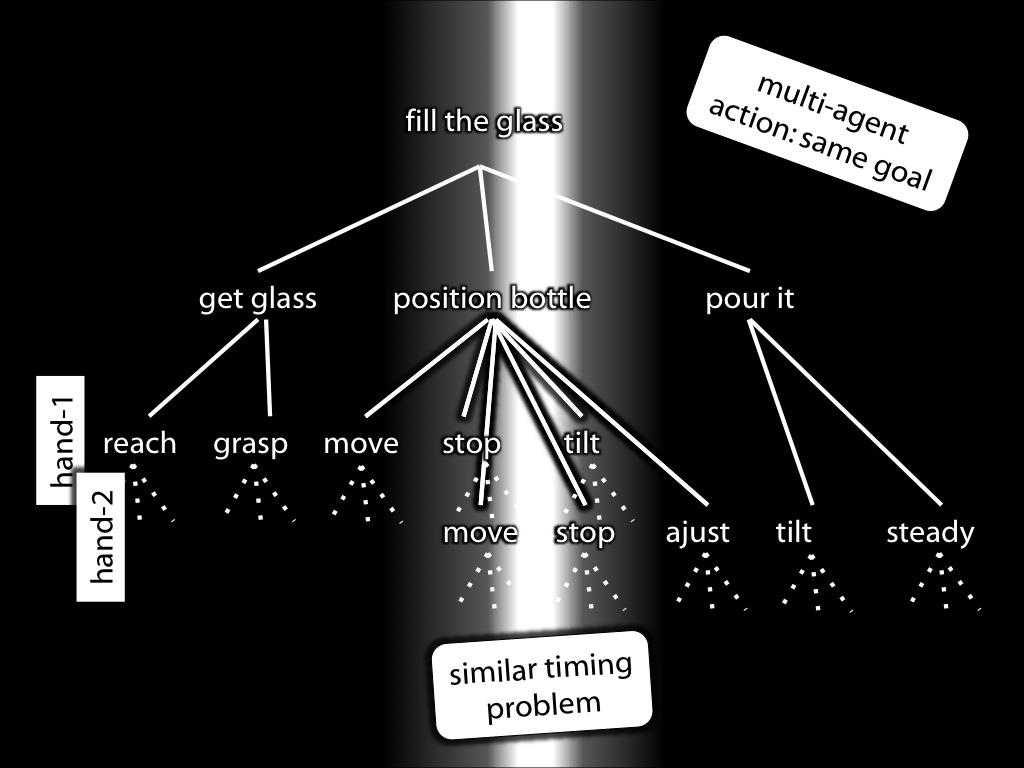
Consider this case.
An agent fills a glass by holding it in one hand, holding the bottle in the other,
bringing the two together and pouring from the bottle into the glass.
[*demonstrate].
It’s a familiar idea that motor representations of outcomes resemble intentions in that they can
trigger processes which are like planning in some respects.
These processes are like planning in that they involve starting with representations of relatively
distal outcomes and gradually filling in details, resulting in a structure of motor representations
that can be hierarchically arranged by the means-end relation \citep{bekkering:2000_imitation,
grafton:2007_evidence}.
Processes triggered by motor representations of outcomes are also planning-like in that they
involve selecting means for actions to be performed now in ways that anticipate future actions
\citep{jeannerod_motor_2006,zhang:2007_planning,rosenbaum:2012_cognition}.
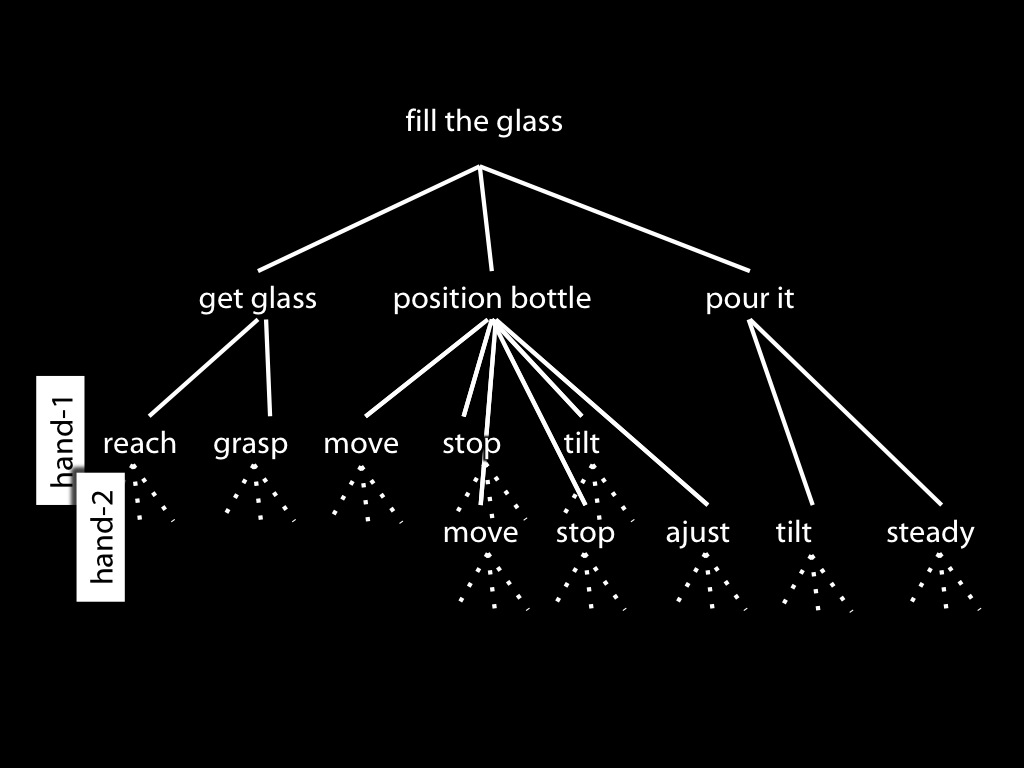
Now in this action of moving a mug, there is a need, even for the single agent, to coordinate the
exchange between her two hands.
(If her action is fluid,
she may proactively adjust her left hand in advance of the mug’s being lifted by her right hand
\citep[compare][]{diedrichsen:2003_anticipatory,hugon:1982_anticipatory, lum:1992_feedforward}.)
How could such tight coordination be achieved?
Part of the answer involves the fact that motor representations and processes concerning the
actions involving each hand are not entirely independent of each other.
Rather there is a plan-like structure of motor representation for the whole action and motor
representations concerning actions involving each hand are components of this larger plan-like structure.
It is in part because they are components of a larger plan-like structure that the movements of
one hand constrain and are constrained by the movements of the other hand.
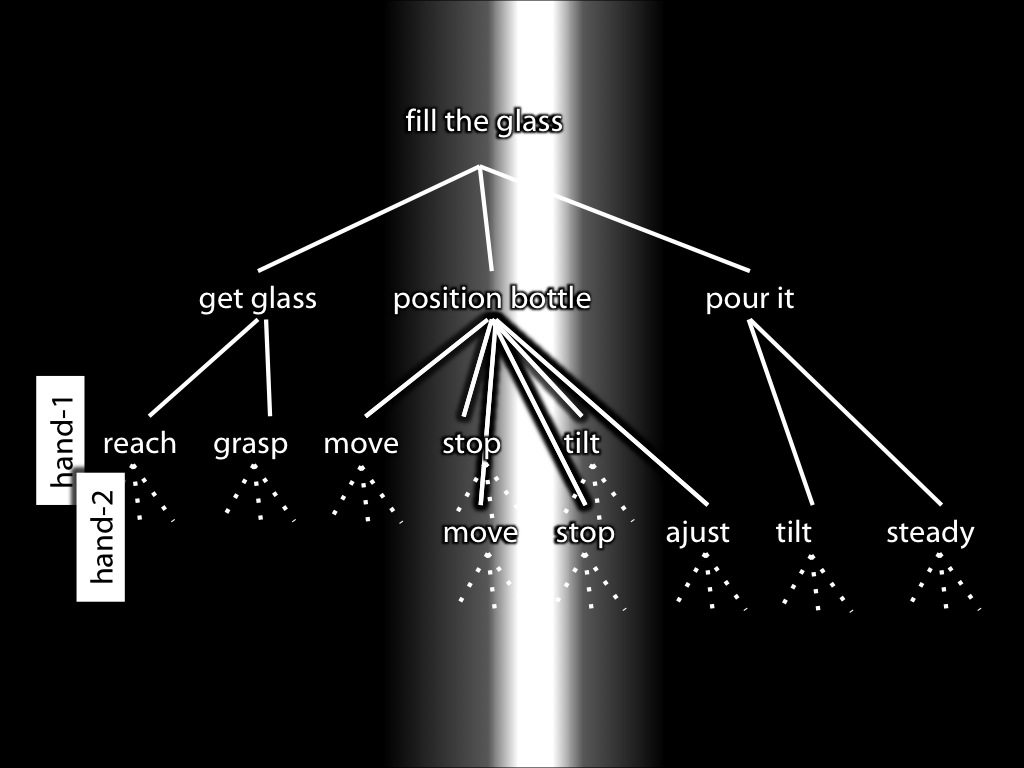
We have just considered what is involved in performing an ordinary, individual action, where an agent
fills a glass from a bottle, taking one in each hand and moving them in a carefully coordinated way.
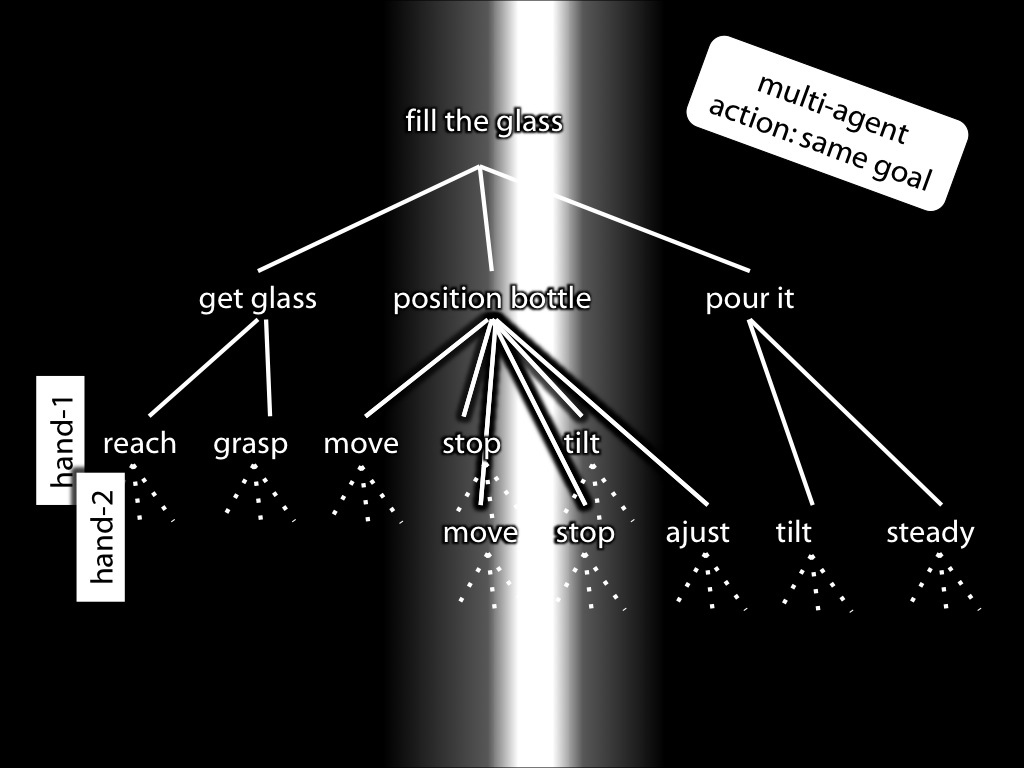
Compare this individual action with the same action performed by two agents as a joint action.
One agent takes the glass while the other takes the bottle.
The joint action is like the individual action in several respects.
First, the goal to which the joint action is directed is the same, namely to move the mug from here to there.
Second, there is a similar coordination problem---the agents’ two hands have to meet.
And, third, the evidence we have mentioned suggests that in joint action, motor representations and processes occur in each agent much like those that would occur if this agent were performing the whole action alone.
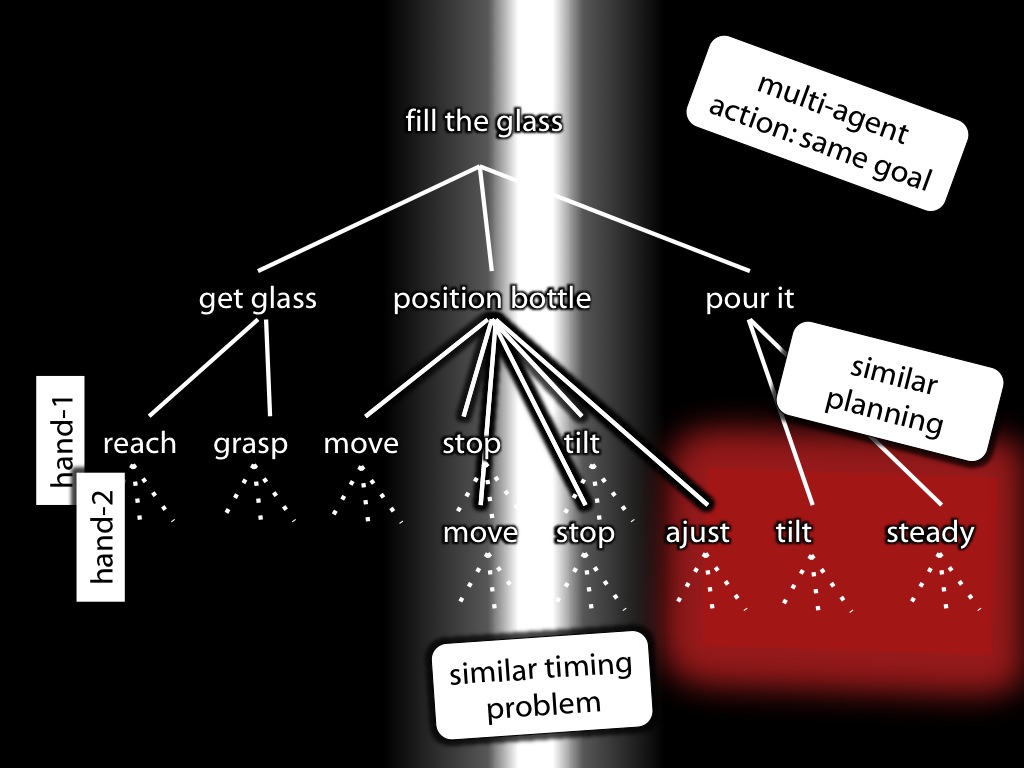
Why would this be helpful?
Suppose the agents' planning-like motor processes are similar enough that, in this context, they will reliably produce approximately the same plan-like structures of motor representations.
Then having a single planning-like motor process for the whole joint action in each agent means that
\begin{enumerate}
\item in each agent there is a plan-like structure of motor representations concerning each of the others’ actions,
\item each agent's plan-like structure concerning another's actions is approximately the same as any other agent's plan-like structure concerning those actions,
\item each agent's plan-like structure concerning her own actions is constrained by her plan-like structures concerning the other’s actions.
\end{enumerate}
So each agent’s plan-like structure of motor representations concerning her own actions is indirectly constrained by the other agents' plan-like structures concerning their own actions
by virtue of being directly constrained by her plan-like structures concerning their actions.
In this way it is possible to use ordinary planning-like motor processes to achieve coordination in joint action.
What enables the two or more agents' plan-like structures of motor representations to mesh is not that they represent each other's plans but that they processes motorically each other's actions and their own as parts of a single action.
So how does the joint action differ from the corresponding individual action?
There are at least two differences.
First, we now have two plan-like structures of motor representations because in each agent there is a planning-like motor process concerning the whole action.
These two structures of motor representations have to be identical or similar enough that the differences don’t matter for the coordination of the agents’ actions---let us abbreviate this by saying that they have to \emph{match}.
The need for matching planning-like structures is not specific to joint action;
it is also required where one agent observing another is able to predict her actions thanks to planning-like motor processes concerning the other’s actions (we mentioned evidence that this occurs above).
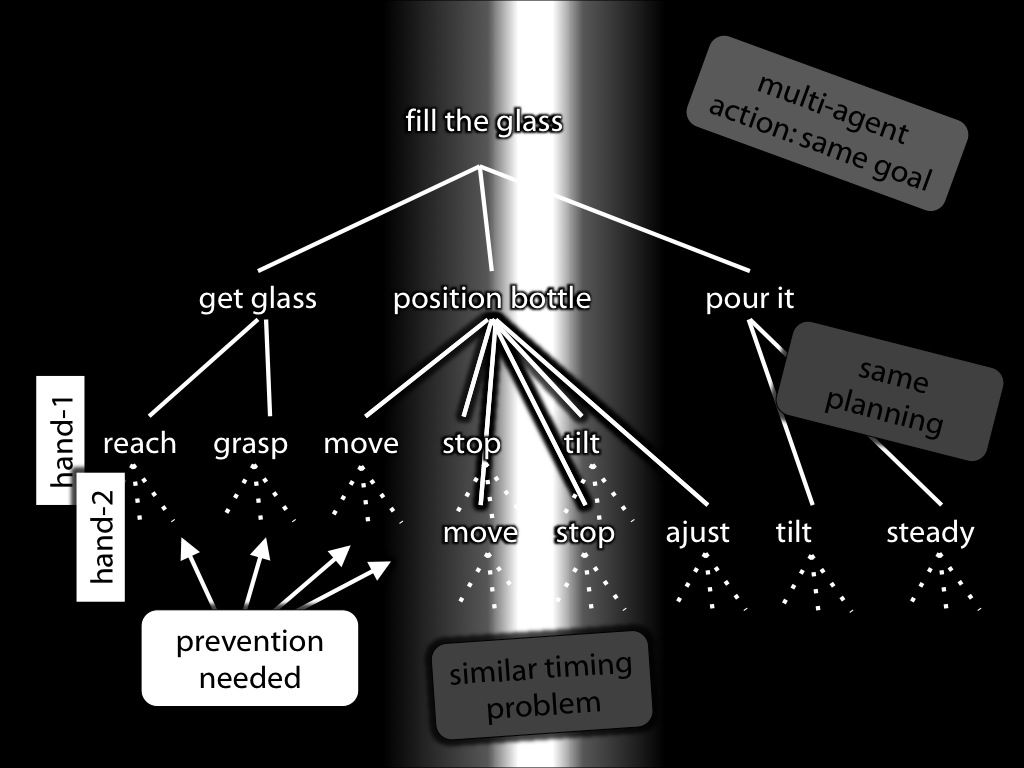
A second difference between the joint action and the individual action is this.
In joint action there are planning-like motor processes in each agent concerning some actions which she will not eventually perform.
There must therefore be something that prevents part but not all of the planning-like motor process leading all the way to action.
Exactly how this selective prevention works is an open question.
We expect bodily and environmental constraints are often relevant.
There may also be differences in how others’ actions are processed motorically \citep[compare][]{novembre:2012_distinguishing}.
\footnote{\citep[p.\ 2901]{novembre:2012_distinguishing}: 'in the context of a joint action—the motor control system is particularly sensitive to the identity of the agent (self or other) of a represented action and that (social) contextual information is one means for achieving this distinction'}
And inhibition could be involved too \citep[compare][]{sebanz:2006_twin_peaks}.
My proposal, then, is this.
In both practical reasoning and motorically, sometimes agents are able to achieve coordination
for joint action not by representing each others’ plans but
by treating each other's actions and their own as if they were parts of a single action.
So perhaps joint action is not always only a matter of intention, knowledge or commitment:
perhaps sometimes joint action constitutively involves motor representation.
In virtue of what do very small scale joint actions have collective goals?
Interagential structures of motor representations.
In virtue of what are very small scale joint actions ever trade-off cooperative?
Interagential structures of motor representations.
Conclusion
\section{Conclusion}
\section{Conclusion}
distributive vs collective interpretations
This simple distinction yields two important, foundational notions ...
acting together
collective goal
Q1: When we act together, in virtue of what could our actions have a collective goal?
Two resources (distinctions) will help us to answer this question ...
Two resources:
parallel vs interconnected planning
practical reasoning vs planning-like motor processes
Q1: When we act together, in virtue of what could our actions have a collective goal?
Q2: In virtue of what could our actions be trade-off cooperative?
Q3: In virtue of what could our planning be coordinated?
- interagential structure of motor representation (limit: very small scale cases only)
- the Simple View Revised (limit: intentional cases only)
Two or more agents perform an intentional joint action exactly when there is an act-type, φ, such that each agent intends that they, these agents, φtogether and their intentions are appropriately related to their actions.
Simple View Revised
... and
we engage in parallel planning;
for each of us, the intention that we, you and I, φ together leads to action via
our contribution to the parallel planning
(where the intention, the planning and
the action are all appropriately related).
So what’s the Simple View doing for me?
NOT: giving me necessary and sufficient conditions for joint action.
Instead, it’s giving us one way in which we can explain how it is possible in principle
for a single mechanism to explain (i) collective goals, (ii) trade-off cooperation and
(iii) coordination of planning.
So what I really want to say is: when these conditions are met, our actions will have those three features.
In addition, it [SVR] features twice in an argument for a pluralistic approach to joint action:
first, in showing that the standard approach based on examples and contrast cases is inadequate;
and, second, in showing that there are multiple answers to the how questions which
involve different psychological mechanisms and unify different features associated with what are
commonly taken to be paradigms of joint action.
How to go about constructing a theory of phenomena associated with acting together?
Step 1: identify features associated with things commonly taken to be paradigm joint actions in non mechanistic terms, e.g.
- collective goals
- coordination
- cooperation
- contralateral commitments
- ...
Step 2: generate how questions.
Step 3: answer the how questions.
Step 4: determine implications for philosophical approaches to joint action.
This approach appears to conflict with Bratman’s approach ...
‘A first step is to say that what distinguishes you and me from you and the Stranger is that you and I share an intention to walk together [...] but you and the Stranger do not.
‘This does not, however,
get us very far; for we do not yet know what a shared intention is, and how it connects up with joint
action’
Bratman, 2009 p. 152
Actually, this should be the third step.
Why should we prefer my approach over the more standard
focus on what distinguishes joint from parallel action question?
(Not that a third approach might not be even better.)
Question
What distinguishes genuine joint actions from parallel but merely individual actions?
Bratman
Simple View Revised
Is coercion compatible with joint action?
yes
yes
Does participating in joint action entail being aware that you are doing so?
yes
[ish]
Are all joint actions cooperative actions?
no
yes
Are contralateral commitments necessary for joint action?
no
no
Question
What distinguishes genuine joint actions from parallel but merely individual actions?
Requirement
Any account of shared agency must draw a line between joint actions and parallel but
merely individual actions.
Aim
Which forms of shared agency underpin our social nature?
There’s a good chance we can find a somewhat satisfying answer to the question somewhere here.
But should we be satisfied with answering the question?
The overall aim remains in place, the Requirement and question should be rejected ...
Separate the thing to be explained from the thing that explains it.
How to go about constructing a theory of phenomena associated with acting together?
Step 1: identify features associated with things commonly taken to be paradigm joint actions in non mechanistic terms, e.g.
- collective goals
- coordination
- cooperation
- contralateral commitments
- ...
Step 2: generate how questions.
Step 3: answer the how questions.
Step 4: determine implications for philosophical approaches to joint action.
A theory of joint action is then an attempt to answer the how questions.
CHALLENGE : Isn’t there something missing from this approach?
Here’s how I think Bratman would respond:
Bratman on strategic equilibrium: This ‘seems not by itself to ensure the kind of sociality we are after [...] a shared activity of the sort we are trying to understand---[...] in the relevant sense, walking together [... There are] important aspects of such shared activities that seem not to be captured [...] our job is to say what those aspects are and how best to understand them’
\citep[pp.~5--6]{bratman:2014_book}
... but here I am tempted to think that the two approaches are one and the same,
and the alternative approach I propose is merely an elaboration of Bratman’s ...
so maybe it is an articulation of Bratman’s project after all (I’m not completely sure).
Here I am tempted to think there is a tension between my approach and Bratman’s
Q1: When we act together, in virtue of what could our actions have a collective goal?
Q2: In virtue of what could our actions be trade-off cooperative?
Q3: In virtue of what could our planning be coordinated?
- interagential structure of motor representation [QQ1,2] (limit: very small scale cases only)
- the Simple View Revised [QQ1,2,3] (limit: intentional cases only)